Mechanical metamaterials, soft robotics
Design of Mechanical Metamaterials; Information Processing in (Meta)Materials
Group: Mechanical Metamaterials
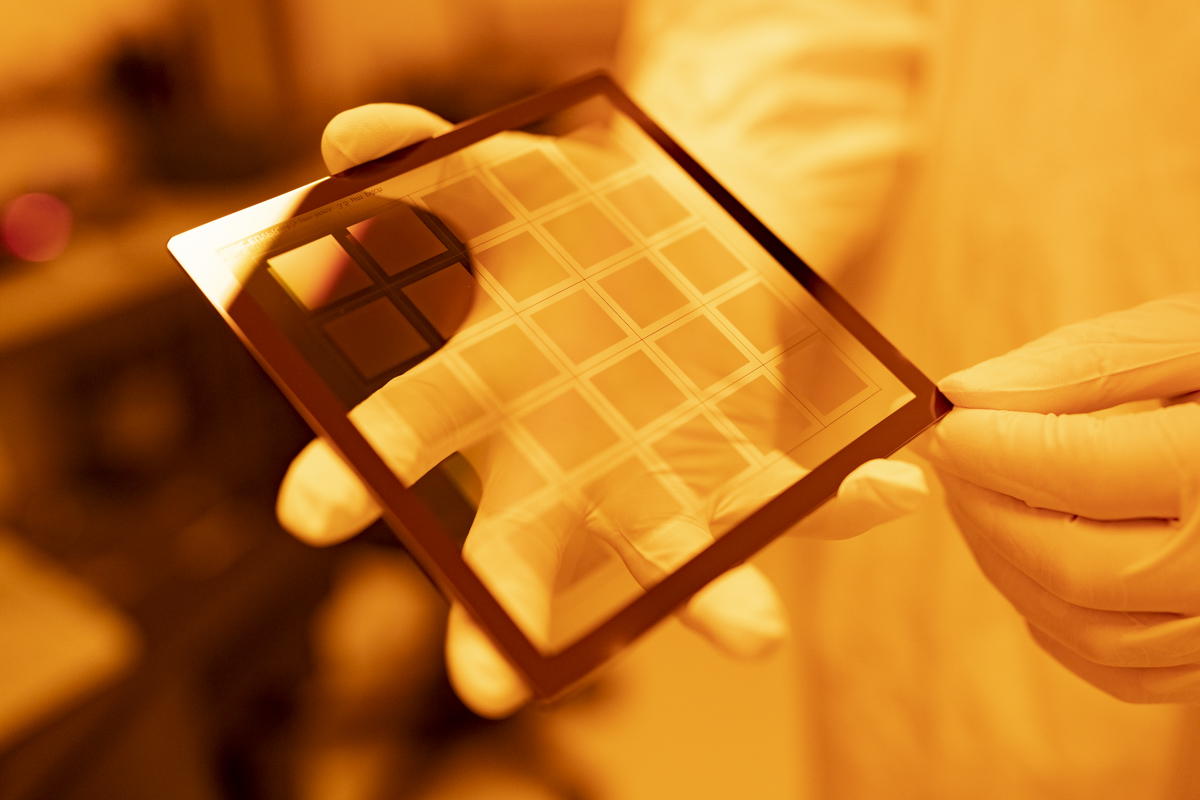
We are developing new design methodologies for complex metamaterials – materials that can change shape and have evolving properties in response to forcing. We are also investigating integrated sensing, information processing, and actuation of such structured materials.
Potential applications
- Prosthetics
- Wearables
- Self-folding structures (space)
- Sensing and positioning; soft robotics
Reference
C. Coulais, E. Teomy, K. de Reus, Y. Shokef and M. van Hecke, Combinatorial design of textured mechanical metamaterials, Nature 535, 529-532 (2016)
Inverse design of (non-linear) mechanical structures and devices
Group: Soft Robotic Matter

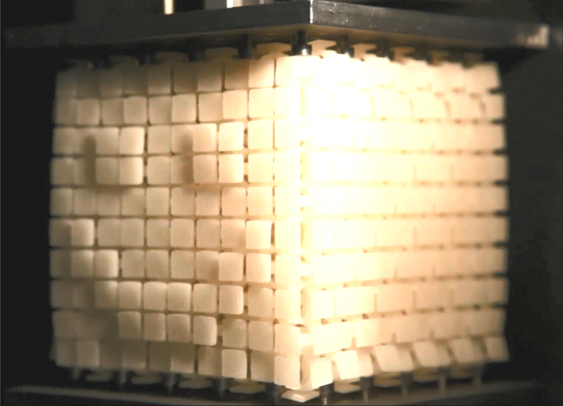
We use stochastic optimization techniques to optimize the architecture of structures for their buckling behavior. The same technique can also be applied to other (non-linear) problems.
Potential applications
- Structural optimization
- (Soft) robotics
Reference
G. Oliveri and J.T.B. Overvelde, Inverse Design of mechanical metamaterials that undergo buckling, Adv. Funct. Mater. 30, 12: 1909033: 1-11 (2020)
Soft robotics
Group: Soft Robotic Matter
Using silicone materials to build soft robots with adaptable properties.

Potential applications
- Adaptable grippers
- Medical implants and devices
- Robotic textiles